Multi-Robot
Motion Planning
with Diffusion Models
Yorai Shaoul*, Itamar Mishani*, Shivam Vats*, Jiaoyang Li, and Maxim Likhachev
Coordinating Multiple Robots
What we want to do
- Plan coordinated motions for multiple robots
- With robots following data-driven motion patterns
Moley Robotics.
Teach skills via demonstrations.
Learn motion preferences from
collected data.
Coordinating Multiple Robots

Amazon Robotics
This work.
"Conveyor"
"Highways"
Freespace
"Drop-Region"


Coordinating Multiple Robots
What we want to do
Given
- a set of robots \(\{\mathcal{R}_i\}_{i=1}^n\)
sharing a workspace (\(\in\mathbb{R}^2\) or \(\in\mathbb{R}^3\) ) - a motion dataset
Compute
- A set of collision-free trajectories \(\{\boldsymbol{\tau}^i\}_{i=1}^n\)
that adhere to the motion patterns
exhibited by the dataset
Motion Pattern
Coordinating Multiple Robots
Options to Tackle the Problem
Available
Data
Expressive Modeling
Scale with Agents
Scale to large environments
Learn directly [Carvalho et al. 2023]
Coordinating Multiple Robots
Options to Tackle the Problem
Available
Data
Expressive Modeling
Scale with Agents
Scale to large environments
Learn directly [Carvalho et al. 2023]
Learn cost maps for
classical planning
Coordinating Multiple Robots
Options to Tackle the Problem
What we want: Rely on local, single-robot data,
and model flexibly
Learn directly [Carvalho et al. 2023]
Available
Data
Expressive Modeling
Scale with Agents
Scale to large environments
Learn cost maps for
classical planning
Coordinating Multiple Robots
How we do it
Coordinate
single-robot planning diffusion models
with insights from
multi-agent path finding.
Background: Constraint-Based Multi-Agent Path Finding
Extensive research on the Multi-Agent Path Finding (MAPF) problem has yielded strong algorithms.
Many algorithms impose constraints on single-robot planners.
For example, Conflict-Based Search (CBS) identifies collisions and re-plans for affected robots under new constraints.
Background: Constraint-Based Multi-Agent Path Finding
For example, Conflict-Based Search (CBS) identifies collisions and re-plans for affected robots under new constraints.
Background: Constraint-Based Multi-Agent Path Finding
For example, Conflict-Based Search (CBS) identifies collisions and re-plans for affected robots under new constraints.


Can we use these coordination ideas for robots that learn their motions?
Background: Diffusion Models
Motion Planning Diffusion models [Carvalho 2023, Janner 2022] generate trajectories from noisy trajectories.
Generate samples from noise.
Carvalho et al. 2023
Dataset
Generated
Background: Diffusion Models
Motion Planning Diffusion models [Carvalho 2023, Janner 2022] generate trajectories from noisy trajectories.
Beginning from a pure noise trajectory \(^K\boldsymbol{\tau}^i\),
the model de-noises it incrementally for \(K\) denoising steps.

Background: Diffusion Models
Motion Planning Diffusion models [Carvalho 2023, Janner 2022] generate trajectories from noisy trajectories.
Denoising Process
Background: Diffusion Models
Motion Planning Diffusion models [Carvalho 2023, Janner 2022] generate trajectories from noisy trajectories.
Denoising Process
Background: Diffusion Models
Motion Planning Diffusion models [Carvalho 2023, Janner 2022] generate trajectories from noisy trajectories.
Denoising Process
Background: Diffusion Models
Motion Planning Diffusion models [Carvalho 2023, Janner 2022] generate trajectories from noisy trajectories.
Denoising Process
Background: Diffusion Models
Denoising Process
Allows us to design "soft" spatio-temporal constraints via guidance functions.
MMD Multi-Robot Multi-Model Diffusion Planning
In this work, we draw on ideas from MAPF algorithms to coordinate learned motion planners.
Example: MMD-CBS
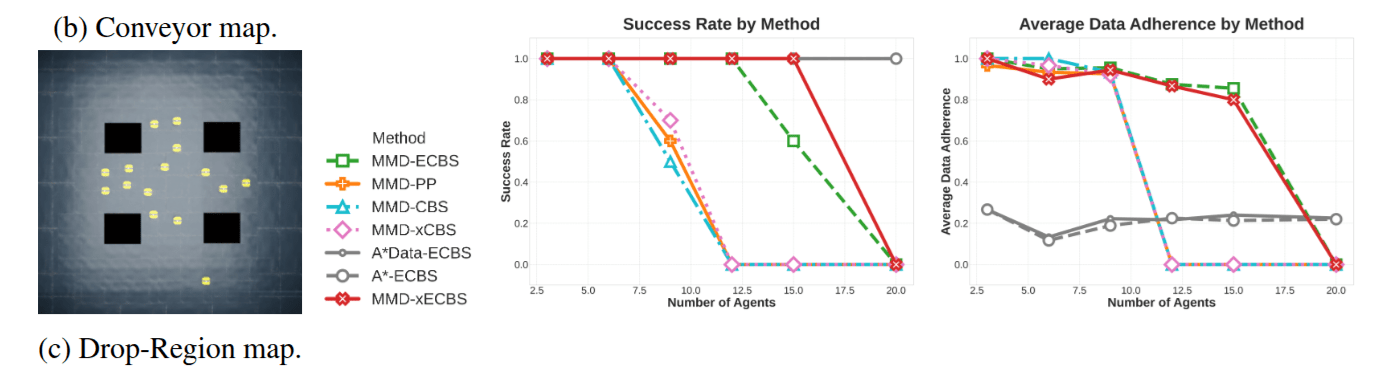
MMD: Results
What we would like to see:
The higher success-rate, the better.
...without compromising data adherence.
Number of Agents
Success Rate
Number of Agents
Data Adherence
MMD: Results
A naive application of CBS is insufficient.

Easy
Hard
MMD: Results
A naive application of CBS is insufficient, and ideas from improved algorithms help.
Easy
Hard
MMD: Results
A naive application of CBS is insufficient, ideas from improved algorithms helped, and baselines struggled.
Easy
Hard
MMD: Results
Please refer to our paper for more results.
Easy
Hard
MMD: Larger Environments
MMD learns single-robot models for small, easy-to-learn, sub-environments and composes those to scale in space and time as well.
Multi-Robot Motion Planning with Diffusion Models
MMD leverage the structure of diffusion models, and ideas from MAPF algorithms, to enable data-driven multi-robot motion planning.